

 首页
首页机器人视觉引导上下料码放系统
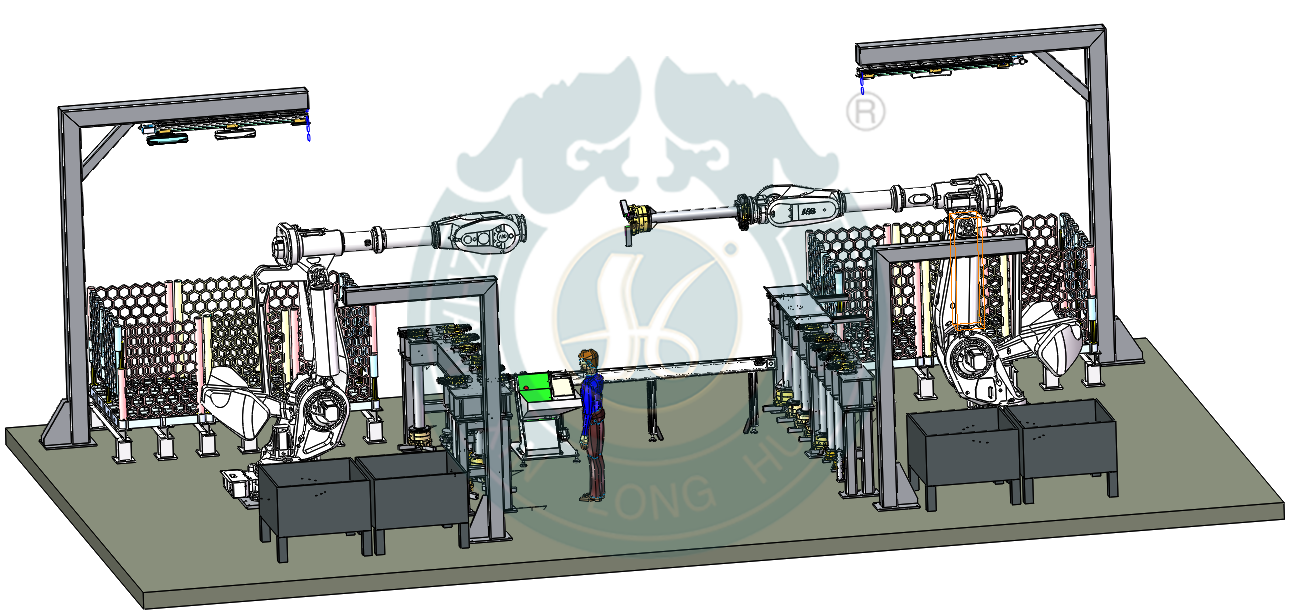
本系统集成了工业机器人、3D视觉识别技术、智能抓取算法与码放规划模块,专为法兰类工件的无序来料场景设计。系统通过视觉感知、智能决策和精准执行,实现从杂乱堆放的工件中自动识别、抓取、定位到有序码放的全流程自动化,解决了传统人工上下料效率低、劳动强大大、安全性不足等问题。
系统核心组成
3D视觉识别模块
采用高精度3D相机(如双目视觉或结构光相机),实时扫描工件堆叠区域;
基于深度学习算法对法兰类工件的姿态、位置、尺寸进行快速识别;
生成点云数据并计算最优抓取点,支持复杂堆叠状态下的避障规划。
工业机器人执行单元
配备6轴高自由度工业机器人(如发那科、ABB或库卡);
末端集成自适应柔性夹具(如电磁吸盘、气动夹爪或真空吸盘),兼容不同尺寸法兰;
支持动态路径规划,避免碰撞并优化运动轨迹。
智能控制与决策系统
基于PLC或工业PC的中央控制器,协调视觉、机器人、输送线等模块;
内置工件数据库,支持多规格法兰参数快速切换;
实时纠偏功能,通过二次视觉校验确保抓取与码放精度。
码放规划模块
根据预设码放规则(如层数、行列间距、交错堆叠)生成码垛方案;
动态调整码放顺序以适应生产节拍,支持托盘、料架或流水线对接。
典型应用场景
汽车制造业:发动机法兰、轮毂轴承法兰的自动化上下料;
阀门管件行业:法兰阀体毛坯件的智能分拣与码垛;
工程机械领域:大型法兰结构件的无人化搬运;
智能仓储物流:法兰成品的自动化立体库出入库
